 |
 |
 |
 |
|
Главная -> Магнитная запись импульсов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 [ 143 ] 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 Поскольку операция сложения выполняется значительно проще операции умножения, для определения свойств системы последовательно соединенных звеньев на практике чаще всего пользуются ЛАХ. Пример 1. Последовательное соединение двух инерционных звеньев (рнс. 20-22, е и г). Встречно-параллельное соединение (обратная связь) Звено Wo. с находится по отношению к звену W во встречно-параллельном соединении (т. е. звено W охвачено обратной связью Wq. с), если вход звена Wo. с соединен с выходом звена W, а выходная величина г/с. с(0 звена Wo. с суммируется со входным воздействием x{t) или вычитается из него (рис. 20-24). Передаточная характеристика эквивалентного звена К ЛАХ. Наносятся две частоты сопряжения: щ = и (02 = -TfT-. ЛАХ представляется: до частоты Oj - прямой, параллельной оси абсцисс на уровне -f 20 lg К; между CDj и CD2 - прямой с наклоном - 20 дб/дек; выгНе (02 - прямой с наклоном - 40 дб/дек (предполагается Ше > (О,) ЛФХ. Складываются две фазовые характеристики с соответствующим пересчетом масштаба по оси абсцисс. Общий фазовый сдвиг при (о О равен нулю, при (D оо равен -п. Амплитудно-фазоваяхарактеристика{см.рис.20-16,6). Пример 2. Последовательное соединение интегрирующего и инерционного звена: -А- W, = - TD+l К D{TD-j-l) Усе
0.С Такой передаточной функцией описывается электрический серводвигатель (см. стр. 428). Параллельное соединение (рис. 20-23) В параллельно соединенных звеньях входной сигнал общий, а выходной сигнал является суммой выходных сигналов отдельных звеньев. Рис. 20-23. Параллельное соединение звеньев: = -ь vy. -Ь . . . -f-vy . Передаточная функция W системы из и параллельно соединенных звеньев W], Wj, . . ., W равен сумме передаточных функций отдельных звеньев: W=Wi-bW,-h...-bW = , где г = ; 2=f; п Рис. 20-24. Соединение обратной связи (встречио-параллельиое соедияенне). а - общее обозначение: б - обозначение отрицательной обратной связи и эквивалентное звено; в - следящая система с обратной связью; W - передаточная функция разомкнутой системы; Ф - замкнутой системы; х = - заданное значение регулируемой величины; у = вых ~ Действительное значение регулируемой величины (выход); Z = 6 = в^ых ~ вх ~ рассогласование. Положительная обратная связь - на звено W подается сумма x(t) и г/о.с(0 так, что входной сигнал для Нравен: z=-x(t) + yo.(t). Отрицательная обратная связь - на звено IF поступает разность x{t) и у о. с(<), так что входной сигнал для W . г= x{t)-~yo.{i). В автома-йше наиболее часто (почти исключительно) используются отрицательные обратные связи. Звено W, охваченное отрицательной обратной связью с передаточной функцией Wq. с. эквивалентно одному звену с передаточной функцией У it) x{t) 1-bWWo.c Если Wo. с не зависит от D, то обратная связь называется жесткой. При положительной обратной связи перед вторым членом знаменателя будет иметь место знак минус. Частный случай: Wo. с = Ь Для которого Ф =-- 1 + W соответствует охвату звена W отрицательной обратной связью, когда на сравнивающий элемент поступает выход- ная величина ii{t), т. е. У(у,с = у. К такой схеме приводится усилитель с отрицательной обратной связью (рис. 20-26). обычно следящая система. Для следящей системы х у = ввых; г = е = ввх - бвых-Зависимостью Для него (см. стр. 424) - К 1 + W где К = определяется передаточная функция замкнутой системы Ф по передаточной функции разомкнутой системы W. Пример 1. Инерционное звено с жесткой обратной связью (рис. 20-25). Ri + Ra и TD-\-\ RiRa Ri + Ra - v/(n) (при условии, что i?2 > Ra)-Для пентода Ri Ra, К = SRa,
~ 1 -Ь SRa 1 + 2 RaPn 1 + SRa . a] Рис. 20-25. Инерционное звено с жесткой обратной связью. а - структурная схема; б - эквивалентное ннерцноиное звено. Передаточная функция инерционного звена без обратной связи (разомкнутой системы) К 1 +SRa I; Т-э = 1 +SRa Пример 2. Интегрирующее звено с жесткой обратной связью. W = Ввых(о Cbxw №-f Г = 5-: Wo.c = - = р. К Для жесткой обратной связи передаточная функция яв- kjl.- тэ = ляется действительным числом Р и Wo.c=-j = p Ввых (как правило О < Р < 1). Передаточная функция звена с обратной связью (замкнутой системы) %ых(0 W Кэ рк W ввх (о ~ 1 + Wo.c ~TsD+l- где /Сэ- J p , .э- 1 + В результате охвата инерционного звена жесткой обратной связью образуется также инерционное звено с меньшим коэффициентом передачи Кэ <К и (что наиболее существенно) с меньшей постоянной Тэ < Т. В частном случае при Р = 1 К 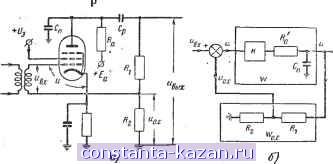 вкх Рис.20-26. Усилитель с обратной связью. а - принципиальная схема; б - структурная схема - эквивалентное инерционное звено W с обратной связью через сопротивления /Сэ = 1 + К' при > 1 /<э 1; Тэ = К Интегрирующее звено в результате рхвата жесткой обратной связью преобразуется в инерционное звено? Соответственно переходная характеристика преобразуется в экспоненту с постоянной времени Тэ, стремящейся к уровню /Сэввх- Если Р = 1, то коэффициент передачи Кэ равен единице (выходная величина в установившемся режиме повторяет входную), а постоянная времени есть величина, обратная коэффициенту усиления, Кэ - Г. Тэ = -j - Для уменьшения инерционности звено можно охватить жесткой обратной связью. Постоянная времени уменьшается тем больше, чем выше К- Соответственно при большом К общий коэффициент передачи бущет близким к еди- Примером указанногр соединения может служить нице. Примером из области радиотехники может служить исполнительный двигатель (при Гдв = 0) с потенциометром отрицательной обратной связи (рис. 20-27). Управляющая обмсяка двухфазного асинхронного двигателя питается Cft лампового усилителя переменного тока. С ротором двигателя связан потенциометр обратной связи, напряжение которого о. с вычитается из входного переменного напряжения и^х- При наличии напряжения и на сетке лампы якорь двигателя начинает вращаться, перемещая связанный с ним через редуктор движок потенциометра обратной Управляющая обмотка 0 +fa 0 двигателя ~1-1/ /Ь°в\ г ! (ЧООги) обмотка двигателя 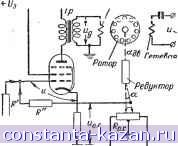 is R,R .R>Rac . I
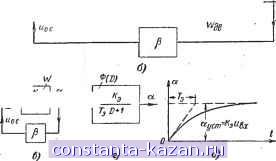 Рис. 20-27. Простейшая следящая система с двигателем. а - упрощенная схема следящей системы для отработки угла а, пропорционального входному напряжению и^ б - структурная схема системы, /С^ - коэффициент передачи входной цепи (от входа до сетки лампы); К^=--коэффици- ент передачи лампового усилителя и трансформатора; К^д= [1/в-сек] - коэффициент передачи двигателя; Кр = - в/град ] - уст - коэффициент передачи редуктора; Р = коэффициент передачи цепи обратной связи; е - преобразованная структурная схема, К = Ki Kj KgKp; г - эквивалентная структурная схема (инерционное звено), К„ = -3-.: 7 = - д - переходная характеристика системы. К связи Rfj. с. Возникающее напряжение о. с- пропорциональное смещению движка а и углу поворота якоря двигателя Одв противофазно входному напряжению, т. е. вычитается из него. Последнее достигается соответствующим выбором направления смещения движка. Напряжение на сетке лампы пропорционально разности ывх и Ыо. с- так как и = /С](ывх- о.с)- Для R = = R = R Kj = 0,5 и = 0,5 (ыех- о-с)- Напряжение на управляющей обмотке у = Кгч, где коэффициентом Ks учитывается усиление лампы и наличие трансфор- матора Тр. Угловая скорость вращения якоря двигателя пропорциональна напряжению Uy, Шдв = /Сдв у- Соответственно передаточная функция двигателя 1Гдв г -~- - = Дв D Угол поворота движка потенциометра а == КрИдв и напряжение, снимаемое с движка потенциометра, о. с - = Родв. Соответственно структурная схема в рассматриваемом примере состоит из интегрирующего звена, усилительных (пропорциональных) звеньев и цепн обратной связи р. Вся система эквивалентна одному инерционному звену с коэффициентом передачи Кэ= к постоянной времени Тэ = -щ. Коэффициент Кэ {град/е) характеризует угол поворота движка потенциометра на единицу входного напряжения. Приведенный пример иллюстрирует следящую систему, предназначенную для поворота выходного вала (движок потенциометра) пропорционально входному напряжению. Инерционность системы характеризуется величиной Ts и зависит от Р и /С. Для уменьшения инерционности следует увеличивать коэффициент усиления. Пример 3. Инерционное звено с дифференцирующим звеном в цепи обратной связи (рис. 20-28).
Рис. 20-28. Инерционное звено с дифференцирующим звеном в цепи обратной связи. а - исходная структурная схема; б - эквивалентная структурная схема. Передаточные функции звеньев равны соответственно: евых(0 К . W (£>) = Го.с(0) = )(<) во. с (О TD-f 1 ввйхИ ГдО-Ы Передаточная функция системы ввых /С(ГдР+1) Ф(0) = ввх (ГО-Ь 1)(ГдО-Ь l)-f/СГдО /С(ГдО+1) rr D2 + (Ti -Ь Тд -Ь /СГд) D -Ы Соединение эквивалентно последовательному соединению двух звеньев: идеального форсирующего с коэффициентом передачи К и звена второго порядка. Таким соединением пользуются, если необходимо ввести в закон регулирования производную. Коэффициент передачи при этом не меняется, однако порядок системы увеличивается на единицу (вместо первого становится второй). ЛАХ и ЛФХ замкнутой следящей системы ЛАХ и ЛФХ замкнутой системы строится по ЛАХ и ЛФХ разомкнутой системы с помощью номограмм (рнс. 20-29): вычисленных на основе зависимости 1-f W |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2026 Constanta-Kazan.ru
Тел: 8(843)265-47-53, 8(843)265-47-52, Факс: 8(843)211-02-95 |