 |
 |
 |
 |
|
Главная -> Магнитная запись импульсов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 [ 150 ] 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 ? 21-2] Функциональные ехемы систем АПЧ где
Рнс. 20-50. Преобразование структурной схемы при наличии параллельной коррекции, с - исходная схема; б - схема, в которой произведена замена параллельного авена эквивалентным в - результирующая (расчетная) схема W = т - - . й - Определение частотных характеристик эквивалентного последовательного корректирующего устройства производится так, как бьшо рассмотрено иа стр. 435. Подбор параметров и вида параллельного корректи рующего звена значительно сложнее, чем последовательного, и производится путем нескольких проб. Несмотря на это, параллельные корректирующие цепи находят в практике сравнительно широкое применение. При синтезе параллельных корректирующих устройств полезно иметь в ввду следующее правило: для интервала частот, в котором справедливо неравенство (20-19) ЛАХ участка системы, охваченного обратной связью, равна взятой с обратным знаком ЛАХ параллельного корректирующего контура W.. Так, если в цепи обратной связи стоит фильтр нижних частот (даюидай фазовое запаздывание), то в области частот, где выполняется условие (20-19), имеет место опережение фазы, как если бы в систему бьша введена дифференцирующая цепь. ГЛАВА ДВАДЦАТЬ ПЕРВАЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ И АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ Системы автоматического управления частотой генераторов (АУЧ) и автоматической регулировки усиления (АРУ) являются наиболее распространенньми системами автоматики радиотехнических устройств, 21-1. НАЗНАЧЕНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ Системы АУЧ предназначены для автоматической стабилизации частоты высокочастотных генераторов (АСЧ) или для автоматической подстройки частоты гетеродинов радиоприемников в соответствии с частотой приходящего сигнала (АПЧ). Различие обоих типов систем АУЧ состоит в следующем. Основное назначение системы АСЧ - противодействие внешним дестабилизирующим факторам, изменяющим частоту стабилизируемого генератора; основное назначение системы АПЧ - автоматическое изменение частоты генератора в соответствии с изменениями частоты колебаний внешнего источника. Указанное различие не имеет принципиального значения и является до некоторой степени формальным. Основные функциональные элементы и динамические характеристики являются одинаковыми для обеих систем. Поэтому в дальнейшем все свойства систем АУЧ рассматриваются применительно к системам АПЧ. В практике используются: системы АПЧ с частотной автоподстройкой (ЧАПЧ) - чувствительный элемент системы (частотный дискриминатор) реагирует на отклонение частоты; системы АПЧ с фазовой автоподстройкой (ФАПЧ) чувствительный элемент (фазовый детектор) реагирует на разность фаз колебаний; комбинированные системы АПЧ, содержащие две петли регулирования: частотной и фазовой автоподстройки, 21-2. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ СИСТЕМ АПЧ Система АПЧ непрерывного действия с лампой реактивного сопротивления (рис. 21-1, а). Частота гетеродина /г автоматически изменяется в соответствии с частотой сигнала так, что стабилизируется разностная (промежуточная) частота f. При верхней настройке flip = fr - fcl при нижней настройке / р = /о - /г- Номинальное значение промежуточной частоты / р, фиксируется настройкой частотного дискриминатора ЧД. При отклонении А/ = /пр - /про на выходе дискриминатора возникает напряжение Ыд, которое через фильтр Ф воздействует на управитель (лампа реактивного сопротивления и гетеродин), в результате чего частота гетеродина изменяется и расстройка уменьшается. Аналогично действует система АСЧ стабилизируемого генератора /с- г по эталонному f. При возникновении разности частотД/ == /эх- /с.г на выходе частотного дискриминатора появляется напряжение, воздействующее на сетку лампы реактивного сопротивления и изменяющее частоту /с. г так, что расстройка уменьшается. Частотный дискриминатор должен реагировать на знак расстройки, и при Д/ = О (когда /с. г = /эт) его выходное напряжение должно быть равно нулю. Этим условиям удовлетворяет дискриминатор нулевыхб нений. Система АПЧ непрчзывного действия с управляющим двигателем (рис. 21-1, б). С выхода дискриминатора напряжение через фильтр поступает на релейный, электронный или магнитный усилитель мощности, который питает исполнительный (управляющий) электродвигатель. С валом двигателя через редуктор соединены роторные пластины подстроечного конденсатора в контуре подстраиваемого генератора. Двигатель вращается до тех пор, пока расстройка (разность между имеющимся и требуемым значением частоты) не станет равной нулю. НПЧ г ! ЛРС Ндетеитщ Kdsmefitnopy праемнит ЛРС ZO.s- Рис. 21-1. Функциональные схемы систем -АПЧ. д, и , Иф д - напряжение сигнала, дискриминатора, управителя, фазового детектора; С - смеситель; УПЧ - усилитель промежуточной частоты; ЧД - частотный детектор (дискриминатор); Ф - фильтр; ЛРС - лампа реактивного сопротивления; Г - гетеродин; ЭЦ - электродвигатель; Р - редуктор; ФД - фааовый детектор; ЭГ - эталонный генератор; СГ - стабилизируемый генератор; КГ - клистроииый гетеродин; ГП - генератор поиска (управляющий элемент); ФЦ - промежуточная фиксирующая цепь (пиконый детектор). Фазовая система АПЧ (рис. 21-1, в) используется для подстройки частоты стабилизируемого генератора /(..г по частоте эталонного генератора /3.,. Колебания обеих частот поступают на фазовый детектор, с выхода которого напряжение поступает на лампу реактивного сопротивления. Частота /с. г меняется при этом до тех пор, пока не установится равной / э^- Комбинированная (фазочастотная) система АПЧ (рис. 21-1, г). Система имеет две петли: фазовой и частотной подстройки. На лампу реактивного сопротивления, управляющую частотой стабилизируемого генератора, поступает сумма напряжений с выхода фазового детектора и частотного дискриминатора. Импульсные системы АПЧ (рис. 21-1, д) используются главным образом в радиолокационных приемниках для подстройки частоты гетеродина-клистрона (/кл) по сигналу, излучаемому магнетроном радиопередатчика (/ ). Они снабжаются генератором поиска и фиксирующей цепью. С помощью этих элементов обеспечивается: автоматический поиск частоты своего передатчика и удержание частоты клистрона в интервалах между импульсами на уровне, зафиксированном в момент прохождения предшествующего импульса. 21-3. ЭЛЕМЕНТЫ СИСТЕМ АПЧ Частотные дискриминаторы (детекторы) Назначение - преобразование отклонения частоты /, поступающей на дискриминатор, от некоторого фиксированного значения /о напряжение, пропорциональное А/ = / - /о- Основная характеристика - зависимость выходного напряжения от f или (рис. 21-2). Переходная частота fg - частота входных колебаний, при которых выходное напряжение равно нулю. Крутизна характеристики - отношение приращения напряжения на выходе к отклонению частоты от переходной. Для линейного участка А Б АИвых где Кд - крутизна характеристики, в/кгц; вых - выходное напряжение, в; Ajf - отклонение частоты от переходной. 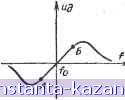 Рис. 21-2. Основная характеристика дискриминатора (зависимость и от f или и от Af). Частотные дискриминаторы делятся на две группы: 1. Дискриминаторы с эталонным генератором (используются в системах АСЧ). Для обеспечения работы требуется наличие внешнего генератора стабильной (эталонной) частоты /эт- 2. Резонансные дискриминаторы без эталонного генератора (используются в системах АПЧ). Переходная частота фиксируется высокоселективными резонансными цепями. Резонансные дискриминаторы Используются для диапазона частот от 30-50 кгц до 60 Мгц. Стабильность переходной частоты определяется эталонными и фиксирующими свойствами резонансных цепей. При изменении емкости C резонансной цепи на ДС и индуктивности Z-o на AL вследствие каких-либо внешних воздействий (изменение температуры, давления и т. п.) переходная частота изменяется на величину AL ДС т ~г Балансный дискриминатор 1 (рис. 21-3). Контуры/ и настроены на переходную частоту fg. Выходное напряжение определяется разностью напряжений, поступающих на диоды Д1 и Дг с точек А-В и Б-В. Эти напряжения образуются путем суммирования напряжений с контура / (поступающих через конденсатор связи (св) и напряжений, индуктированных в катушке контура . Прн точной настройке на резонансную частоту обоих контуров напряжения, поступающие на диоды, одинаковы, поскольку обе составляющие имеют сдвиг фаз (рис. 21-3, б). Прн отклонении частоты от фазовый сдвиг изменяется, в результате чего напряжения, поступающие на диоды, будут неодинаковыми и выходное напряжение будет отличным от нуля. Знак выходного напряжения зависит от знака расстройки. Иногда он называется также дискриминатором с фазовым детектированием. Выходное напряжение где и„,с - амплитуда напряжения на сетке лампы; /Сд - коэффициент передачи амплитудного детектора (порядка 0,9); S - крутизна характеристики пентода; Rs - эквивалентное сопротивление контура; яр - функция относительной расстройки а и относительного коэффициента связи Р (рис. 21-3, е); а= Q - относительная расстройка; А/ = / - /о - расстройка; Q - добротность контуров; Р= kQ; k - коэффициент связи между контурами. 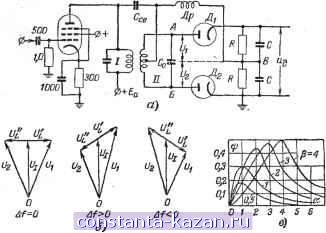 Дискриминатор критичен к настройке контуров и степени связи р. При расстройке контуров смещается переходная частота дискриминатора и характеристика становится асимметричной. Слишком большая связь между контурами может привести к искривлению участка АБ характеристики. При малой связи сокращается протяженность линейного участка и уменьшается крутизна характеристики дискриминатора (рис. 21-3, в). Дискриминатор с расстроенными контурами (рис. 21-4). Контуры 1 к И имеют практически одинаковые параметры и расстроены относительно переходной частоты на величину ±Д/т. Выходное напряжение вых = lmc SKsK, где ip - функция относительной расстройки а и относи тельного разноса резонансных частот контуров Кр (рис. 21-4, в): К'д - коэффициент передачи амплитудного детектора (порядка 0,9). При заданном значении 2Д/ , максимальная крутизна Кд. макс = (1.5 -ь 1,7) £/, с5/<д (2Д/1)гСк достигается при Q- (2 3) ем- 2Д/т кость контуров с учетом паразитных параметров. Крутизна характеристики в дискриминаторах на расстроенных контурах при одинаковой добротности в 1,5-1,2 раза выше, чем у балансных дискриминаторов. Р ис. 21-3. Балансный дискриминатор. а - схема {RC - нагрузочные цепи детекторов и Д^; Др - высокочастотный дроссель); б -векторные диаграммы для небольших расстроек {Uj - напряжение, передаваемое с контура ; через конденсатор связи С^; u и if - напряжения, индуктируемые на верхней и нижней половине катушки контура ); в - зависимость функции ф от относительной рас. стройки о при различной связи между катушками контуров. Постоянная времени нагрузочной цепи детектора RC > -j--. Например, при U = 450 кгц R = 0,5 Мом; С = 500 пф. Для импульсных АПЧ RC < (t - длительность импульса). При расчете обычно ставится, задача: при заданном расстоянии между экстремумами 2hfm (которое не должно быть уже полосы пропускания приемника) требуется получение наибольшего значения крутизны характеристики Кд. Практически это достигается при Р = 3-:-4и Q - ~2Д7~ При этом К -п чк -5 1,6 Ад. макс - шсЛЛд -(Щ;;)гс7 где Ск - емкость контуров (с учетом паразитных параметров). Обычно /<д. макс имеет порядок нескольких единиц вольт на килогерц. Расширение 2b.f ведет к уменьшению крутизны. Требования широкой полосы и высокой крутизны характеристики противоречивы. т
0.8 1,6
г,8 3,6 Рис. 21-4. Дискриминатор на расстроенных контурах. а - принципиальная схема; б - резонансная характеристика контуров; в - зависимость ф от относительной расстройки прн различном начальном разносе, резонансных частот а . Постоян- ная времени RC > . Для fo = 30 Мгц ;? = 100 ком; С = = 500 пф; для импульсной АПЧ R = 100 ком; С = 100 - 7- 50 пф. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2026 Constanta-Kazan.ru
Тел: 8(843)265-47-53, 8(843)265-47-52, Факс: 8(843)211-02-95 |