 |
 |
 |
 |
|
Главная -> Электропитание устройств связи 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 Активная мощность, выделяемая в нагрузке Р2=р5нС03ф2, где SnmUzahn - номинальная полная мощность трансформатора, ВА; т - ЧИСЛО фаз трансформатора. КПД трансформатора представляет собой отношение активной мощности, выделяемой в нагрузке к активной мощности, потребляемой им из сети, 2 Р2 Р Sb cos ф2 Рг+Рст-\-Роб Р S cos фг + Ро + (1.21)  Cos v=t Выражение (1.21) позволяет определить т] при любых значе-ниях р и cos ф2, не нагружая трансформатор. Из графиков рис. 1.21 следует, что зависимости т]=/(р) Ихмеют максимум. Взяв из выражения (1.21) производную т] по р и приравняв ее нулю, определим коэффициент нагрузки трансформато- р^ р ра Ршах, соответствующий наи- l. Зависимость КПД трансбольшему значению кпд, форматора от нагрузки [Р5 С05ф2-Ь Po-f Р'Ркв]-[5 со5ф2-)-2рРк„]Р = 0. Следовательно, КПД тра.чсфор.матора достигает мак^им.ально-го значения при равенстве посгоянных и переменных потерь, т. е. при Ро=р2тахР1ш. Как указывалось ранее, постоянные потери - это потери в стали сердечника трансформатора, пропорциональные квадрату магнитной индукции. Потери переменные - это потери в проводах обмоток трансформатора, пропорциональные квадрату плотности тока. Изменяя магнитную индукцию и плотность тока, можно варьировать соотношение постоянных и перемегшых потерь и тем самым изменять величину коэффициента нагрузки Ртах, соответствующего наибольшему значению г\ Если трансформатор постоянно работает на номинальную на- грузку, то стремятся получить наибольший КПД при номинальном токе, т. е. при Ртах=1, что является обычным для трансформаторов малой мощности. Если же трансформатор работает в режиме частых и значительных недогрузок (силовые, осветительные и другие трансф9рматоры), то целесообразно получить наибольший КПД при нагрузках, меньше номинальных, т. е. при ртах<1-. Глава вторая. Магнитные усилители 2.1. ОБЩИ СВЕДЕНИЯ простейший однофазный магнитный усилитель (МУ) представляет собой два идентичных трансформатора, первичные обмотки которых, называемые рабочими, соединяются между собой последовательно или параллельно и подключаются к источнику напряжения переменного тока. Нагрузка включается в цепь рабочих обмоток непосредственно или через выпрямительное устройство. Вторичные обмотки, называемые обмотками управления, соединяются последовательно и подключаются к источнику постоянного тока. Первичные и вторичные обмотки трансформаторов включаются так, чтобы обеспечить насыщение сердечников в разные полупериоды изменения напряжения источника питания. Принцип работы МУ заключается в том, чго в течение части Kaifloro из полупериодов изменения напряжения источника питания пока ни один из сердечников не насыщен, ток в нагрузке мал (пр1ед£тавляет, по существу, ток холостого хода трансформаторов), и практически все напряжение оказывается приложенным к рабочим обмоткам. В течение остальной части каждого из полупериодов, когда сердечники находятся в пасыщении, практически все напряжение источника питания оказывается приложенным к нагрузке. Благодаря такому периодическому возникновению и исчезновению большого сопротивления последовательно с нагрузкой, Л\У работает как ключ, между источником питания и нагрузкой. Момент его замыкания может быть изменен выбором величины намагничивающей силы (НС) обмоток управления. Рассмотри.м рис. 2.1. Сердечник МУ изображается в схемах жирной прямой линией. В отличие от трансформаторов оси обмоток МУ располагаются на схеме перпендикулярно линии сердечника. Выпуклости в графических изображениях рабочих обмоток и обмоток управления направлены взаимно противоположно. Условные начала обмоток отмечаются точками. Направление НС обмо- 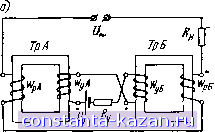 Hp f Ho \ .joK и пропорциональных им дапряженностей принято изображать стрелками, параллельными линии сердечника. Если ток входит в вывод обмотки, отмеченный точкой, то стрелку необходимо направить в сторону рабочей обмотки. Широкое применение МУ в электропитающих и измерительных устройствах и устрой- S) ствах связи обусловлено такими достоинствами их, как высокая надежность; высокий коэффициент усиления (до 10*-10), > низкий порог чувствительности (до 10-1*-10-16 Вт-), возмож-f ность работы от сетей перемен- ного тока различной частоты (промышленной - 50 Гц, повышенной - 400 Гц и высокой - 10-10 Гц); конструктивная простота, сравнительная дешевизна и гальваническая развязка цепей управления и нагрузки. В настоящее время известно большое количество различных схем и разновидностей МУ, которые можно разделить по следующим признакам: 1. По виду статической характеристики управления - на одно-гактные (нереверсивные) и двухтактные (реверсивные). 2. По способу осуществления обратной связи - на МУ с внешней, внутренней и смешанной обратной связью. При этом обратная связь может быть положительной или отрицательной, по току или по напряжению, магнитной или электрической, жесткой или гибкой. 3. По быстродействию - обычные и быстродействующие. 4. По способу включения нагрузки - на МУ с последовательным или параллельным относительно нагрузки включением рабочих обмоток. 5. По числу и конструрщии сердечников в однотактной схеме. Рис. -2.1. Схема дроссельного магнитного усилителя (Д|МУ): а) принципиальная схема МУ при последовательном соединении рабочих обмоток и непосредственном включении нагрузки; б) условная электрическая схема замещения 2.2. ОДНОТАКТПЫЙ ДРОССЕЛЬНЫЙ МУ Отличительной особенностью дроссельных МУ является отсутст-ствие постоянной составляющей втоке рабочих обмоток (рис. 2.1а). Рассмотрим работу такого МУ в установившемся режиме при следующих допущениях: |
|
© 2026 Constanta-Kazan.ru
Тел: 8(843)265-47-53, 8(843)265-47-52, Факс: 8(843)211-02-95 |