 |
 |
 |
 |
|
Главная -> Электропитание устройств связи 1 2 3 4 5 6 7 8 9 10 11 12 13 [ 14 ] 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 3 Вентили Д1 и Дг имеют бесконечно большое обратное и нулевое прямое сопротивления 4 Активное сопротивление и индуктивность рассеяния рабочих обмоток равны нулю Пусть О^м/л; является оабочим полупериодом сердечника Л (вентиль Д.1 открыт), его индукция в начале полупериода (определяется напряженностью поля управляющего сигнала i/y= =/у-у-)на статической пегле гистерезиса равна ВуА, а в сердечнике Б равна индукнии насыщения В интервале возбуждения сердечника А, пока он не насыщен, в результате изменения индукции в его обмотке управления индуцируется ЭДГ, которая суммируется с напряжением сигнала управления и прикладывается к обмотке управления сердечника Б. В результате в сердечнике Б его обмоткой управления возбуждается переменное магнитное поле Для цепи управления справедливо соотношение, совпадающее с выражением (2 И) yS- + yS + hRy-r (2.14) При условии, что /?у->0 также выполняется и равенство (2.2). На интервале возбуждения сердечника А для рабочей цепи справедливо уравнение . . WpS + Ri ,==Us\xi.&t, , (2.15) в кЬтором, как правило, молено пренебречь величиной намагничивающего тока гихх, оп0еделяемой как Тогда, интегрируя (2 15) jc учетом (2 2) и Ihxx=0. получим выражения для закона изменения индукции в сердечниках, совпадающие с (2 5) и (2 6) a = 5yA + 6m(l-COSCuO, Вб = £5-5(1 -COS СО/), где Bm=UJ((,)WpS) В отличие 01 дроссельных МУ в рассматриваемом МУ перемагничивание сердечника Б на интервале возбуждения осуществляется не рабочей обмоткой (ipB =0), а обмоткой управления Для интервала возбуждения характерно быстрое перемагничивание сердечников, поэтому индукция в них изменяется по динамическим петлям* гистерезиса На основании закона полного тока для сердечника Б па интер ьале возбуждения может быть определен ток управления Если положить .1д = со. то на интервале возбуждения ток ур--равления будет неизменным 1у = - сД = ~сД : const. (2.17) В момент /= /м индукция в сердечнике А достигает значения Bs и в дальнейшем не изменяется. В обмотках трансформатора А ЭДС не индуцируется. Поэтому величина индукции в сердечнике Б будет определяться напряженностью управляющего сигнала иа статической петле гистерезиса. На основании закона полного тока для сердечника Б на интервале насыщения можно определить величину iy fB = - fc + Bg/гдг„ = гyШy/z, lд При !.1д = оо iy = - (l/Wy) H = ~I const. (2.18) В отличие от дроссельных МУ на интервале насыщения сердечника А рабочая обмотка сердечника Б отключена вентилем До от источника питания. Поэтому ток из рабочей цепи уже не будет трансформироваться в цепь управления, т. е. полностью устраняется отрицательная ОС характерная для дроссельных МУ. Выражения для угла насыщения, мгновенного и среднего значений тока нагрузки совпадают с соответствующими выражениями для дроссельных МУ. Среднее значение тока управления в интервале О^Ы^л в соответствии с выражениями (2.17) и (2.18) -о а (2.19) Относительная величина среднего значения тока нагрузки в соответствии с выражениями (2.9), (2.9а) и (2.19) (без учета намагничивающего тока /iioix) .может быть представлена в виде Выражение (2.20) справедливо при -/сд/у^-/с Действительно, при /у>-1с установившееся значение магнитной индук- ции равно индукции насыщения, т. е. сердечники находятся в насыщении в течение всего периода, поэтому ток нагрузки равен максимальному значению. Минимальное значение тока нагрузки имеет место при /у = -/сд. Из выражения (2.16) для намагничивающего тока с учетом соотношения (2.17) при [1д=оо имеем 4хх = 2 ,д( Шр). среднее за полупериод значение намагничивающего тока зависит от величины угла насыщения /нохх = 2(а/я)Я,д(/Н). (2.21) Подставляя в выражение (2.21) а=я, найдем минимальное значение тока нагрузки 4от/ = 2( едг/Шр) = 2/ед. (2.22) Выражения (2.20) и (2.22) определяют характеристику управления МУ с внутренней ОС. Характеристика управления МУ на реальных середечниках отличается от идеальной (рис. 2.11). На рис. 2.12 представлена экс- ио/на max . ,. 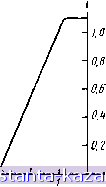 -f -2 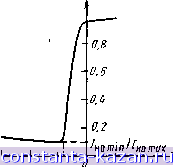 -15 -10 -5 5 W Iy мА Рис. 2Л Г. Характеристика управления МУ с внутренней обратной связью (Ясд/Яс = 3 и аЯсдг/р/н<,т п=!0,7). Рис. 2.12. Экспериментальная характеристика МУ с внутренней обратной связью периментальная характеристика управления МУ, выполненного на сердечниках из желозоникелевого сплава 50НП. Наиболее существенное отличие характеристик рис. 2.11 и рис. 2.12 заключается в том, что ток нагрузки меньше /нотах в отсутствие входного сигнала. Это объясняется тем, что рабочие обмотки обладают как активным, так и индуктивным сопротивлением при насыщении сердечников ((is>0). |
|
© 2026 Constanta-Kazan.ru
Тел: 8(843)265-47-53, 8(843)265-47-52, Факс: 8(843)211-02-95 |