 |
 |
 |
 |
|
Главная -> Электропитание устройств связи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 [ 84 ] 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 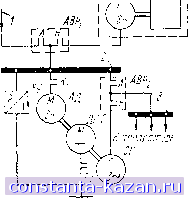 АВ 2208 Рис. 112 5. Структурная схема УГП с трехмашинным агрегатом с приводом от переменного и постоянного тока: / - внешнее электроснабжение; 2 - шины негарантированного переменного тока 400/230 В, 3 - шины гарантированного переменного тока 380/220 В трехмашинный агрегат иродолжа- АДГЭ ет вращаться без остановки под Г'СГ действием вращающего момента двигателя постоянного тока. Асин-кронный двигатель отключается от сети контактором К\ только после того, как начинает работать двигатель постоянного тока. Время переходного процесса при смене привода агрегата с сети переменного тока на постоянный составляет 1,5-2,0 с. В переходном режиме изменение напряжения (частоты тока) на выходе генератора составляет ±5% от номинального значения. При восстановлении внешнего электроснабжения или включения резервной электростанции обратная смена привода осуществляется такл<е автоматически. Асинхронный двигатель подключается к сети, а уже после этого отключается от АБ двигатель постоянного тока. При переходе с привода постоянного тока на переменный время переходного процесса составляет около 1 с, а колебания напряжения на выходе генератора не превышает ±3% от номинального значения. Так как трехмашинный агрегат находится непрерывно в работе, то для повышения надежности электроустановки предприятия связи он резервируегся. В случае повреждения рабочего трехма-шинного агрегата автоматически запускается и подключается к нагрузке резервный. Однако перерыв в питании аппаратуры при этом может достигать 10 с. Для уменьшения перерыва в питании аппаратуры при аварийном переходе с рабочего на резервный агрегат нагрузка может получать питание от сети переменного тока через контактор А устройства ABPz. В этохм случае перерыв в питании определяется временем переключения контакторов устройства ABPz- Достоинством УГП с трехмашинными агрегатами по сравнению е УГП-ЭМ при двойном преобразовании энергии является более высокий КПД и коэффициент мощности, а также большая надежность электроустановки, благодаря наличию двух приводных электродвигателей, резервируюших друг друга. Промышленностью выпускаются комплекты оборудования для < ГП с трехмашинны.ми агрегатами на мощности 24, 50 и 100 кВт в одном агрегате Это позволяет комплектовать установки грех- фазного переменного тока частотой 50 Гц и напряжениСхМ 380/220 В, мощностью от 24 до 400 кВт (39]. Обычно УГП состоят из одного, двух, трех и четырех трехма-шинных агрегатов при одном резервном. Применение децентрализованной системы электропитания дает возможность повысить надежность работы части аппаратуры. Поэтому на магистралях коаксиального кабеля не рекомендуется применять УГП меньше, чем с двумя рабочими и одним резервным агрегатом. Как показано в [40], применение УГП, состояш,их из четырех рабочих агрегатов вместо двух, дает возможность увеличить среднее время наработки на отказ (при условии сохранения электропитания 50% аппаратуры связи) на два порядка. Кроме того, применение децентрализованной системы электропитания дает возможность постепенно наращивать мощности по мере ввода в действие аппаратуры отдельных систем передачи информации. Агрегаты УГП-ЭМ.-50 комплектуются из следующих электрических машин: - трехфазный асинхронный электродвигатель с короткозамкнутым ротором типа А-91-4 (75 кВт, 1470 об/мин, 380/220 В), - трехфазный синхронный генератор типа ЕСС-91-4щ (50 кВт, 1500 об/мин, 400 В); - двигатель постоянного тока с параллельным возбуждением типа П-102 (75 кВт, 1000 об/мин, 220 В). Обычно УГП-ЭМ-50 обеспечивает на выходе стабильность напряжения с точностью ±2% и частоты тока 49,5 Гц с точностью при смене приводов и при разряде батареи ±2 Гц. КПД при полной нагрузке равен 0,8, а при половинной - 0,7. Трехмашинными агрегатами управляют с панелей управления и автоматики. На этих же панелях размещены устройства коммутации, защиты и сигнализации. Установка мощностью 100 кВт (два рабочих и один резервный агрегат) содержит 16 панелей управления и коммутации. В УГП-ЭМ-50 как .рабочие, так и резервные трехмашинные агрегаты запускаются от привода постоянного тока при отключенной нагрузке. В начальный момент пуска якорь двигателя неподвижен и противоэдс равна нулю. Поэтому при непосредственном подключении двигателя к источнику питания в обмотке якоря будет протекать чрезмерно большой ток, равный /пуск = п/га, где - напряжение источника питания; Га - сопротивление обмотки якоря Большой пусковой ток является опасным как для самого двигателя, так и для приемника механической энергии (синхронного генератора и асинхронного двигателя). При большом токе нагревается обмотка якоря и возникает интенсивное искрен!е под щетками, из-за чего коллектор может выйти из строя. Вал двигателя подвергается механическим ударам, так как при большом токе резко увеличивается вращающий момент. Для ограничения пускового тока в схеме используется пусковой реостат, включаемый последовательно с якорем двигателя 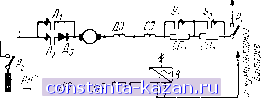 /J, t- Рис 1Й 6 Схема управления ДПТ трехмашин-ного агрегата (рис. 12.6) Пусковой реостат представляет собой проволочное сопротивление, рассчитываемое на кратковременный режим работы, и выполнен ступенчатым, что дает возможность изменять ток в якоре двигателя в процессе его пуска (в две ступени СЯ, .и СЯг). В первый мо.мент при пуске двигателя последовательно с якорем включены обе ступени пускового реостата (контакты реле У1 и Уз разомкнуты). Поэто- if му через обмотку якоря. протекает ток, не превы-] шающий номинального значения. В результате взаимодействия тока в якоре с магнитным полем полюсов, возбуждаемым обмоткой ШО, создается пусковой момент на валу двигателя, больший тормозного (А!п>ск>Л4т) и трехмашинный агрегат придет во вращение. В силу инерции скорость вращения не может мгновенно изменяться и число обороюв якоря будет постепенно увеличиваться по экспоненциальной зависимости (рис. 12.7). При увеличении скорости вращения якоря увеличивается противоэдс и ток в якоре начнет уменьшаться, что вызывает уменьшение вращающего момента двигателя. Если оставить длительно включенным все сопротивление пускового реостата, то число оборотов и ток в якоре приняли бы установившиеся значения, показанные на графике пунктиром. Однако в рабочем режиме сопротивление пускового реостата должно быть полностью выведено, так как оно рассчитано на кратковременный режим и при длительном прохождении тока окажется выведенным из строя. В момент времени ti одна ступень пускового реостата закорачивается. Уменьшение сопротивления пускового реостата приведет к увеличению пускового тока, а следовательно, вращающего момента. Поэтому скорость вращения вновь увеличивается. С увеличением скорости вращения увеличивается противоэдс, что вызывает уменьшение тока в якоре В момент tz сопротивление пускового реостата закорачивается полностью, что увеличит ток в якоре и вращающий момент. В результате по окончании переходного процесса скорость вращения двигателя достигнет номинального значения. 9-311 257
Рис. 12 7. Изменение тока в якоре и скорости вращения якоря при пуске ДПТ |
|||||||||||||
|
© 2026 Constanta-Kazan.ru
Тел: 8(843)265-47-53, 8(843)265-47-52, Факс: 8(843)211-02-95 |